«Кисти и стопы травмируются чаще других частей тела, при этом протезами дистальных отделов конечностей управлять сложнее, — говорит руководитель STEM-центра ТУСУРа Юлия Лобода.— Промышленные манипуляторы работают с точностью до миллиметра, а человек с протезом не всегда может взять стеклянную посуду, не разбив ее. Эта проблема будет решена, если добавить нейроуправление».
Сейчас для управления протезами используются миодатчики, которые крепятся к концевым мышцам культи. Однако, когда конечность ампутирована, система управления перестраивается и сигналов с миодатчиков становится недостаточно. В редких случаях пациентам вживляют в мозг инвазивные нейродатчики, но этот метод требует хирургического вмешательства, длительного наблюдения и чреват риском осложнений (например, эпилепсии).
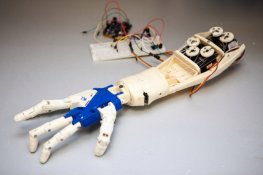
Нейроинтерфейс, который используют в ТУСУРе, закрепляется на голове неинвазивно и считывает сигналы мозга. Протез руки для экспериментов разработчики распечатали на 3D-принтере, а задачу — создание базы паттернов положений кисти — решают вместе с учеными Сибирского государственного медицинского университета (СибГМУ).
«Паттерны — это такие устойчивые положения конечности, — объясняет Юлия Лобода. — Существуют готовые базы паттернов, но их несколько, было непросто выбрать на какую именно опираться. Сейчас мы работаем с классификацией, которая включает восемь положений. Чтобы проверить интерфейс, мы сравнивали его сигналы с показаниями сложного оборудования для анализа деятельности мозга на кафедре неврологии СибГМУ. В идеале нужно создать базу не статичных, а динамичных паттернов — мы пытаемся смоделировать переходы из одного положения в другое. Это как раз позволит, например, точно захватывать предмет».
Распознавание сигналов и их соединение с нужными положениями — самая сложная часть системы управления протезами. Обучение программы распознаванию сигналов конкретного человека займет около двух недель. Параллельно пациент учится осознанно формировать сигнал управления протезом.
«Сейчас для освоения протезов требуется от нескольких месяцев до нескольких лет. При этом многие не доходят до конца, отказываются, пользуются только неподвижным протезом», — акцентирует Юлия Лобода.
Для системы уже написан начальный код. Сейчас идет этап экспериментов, сбора статистики, нарабатываются базы сигналов. Планируется, что через год после начала финансирования продукт будет готов. Чтобы удешевить его, разработчики хотят организовать малое инновационное предприятие и создавать все элементы системы сами, опираясь на партнеров в томском НПЦ «Полюс».


